842993839
150-7115-5369
菜单
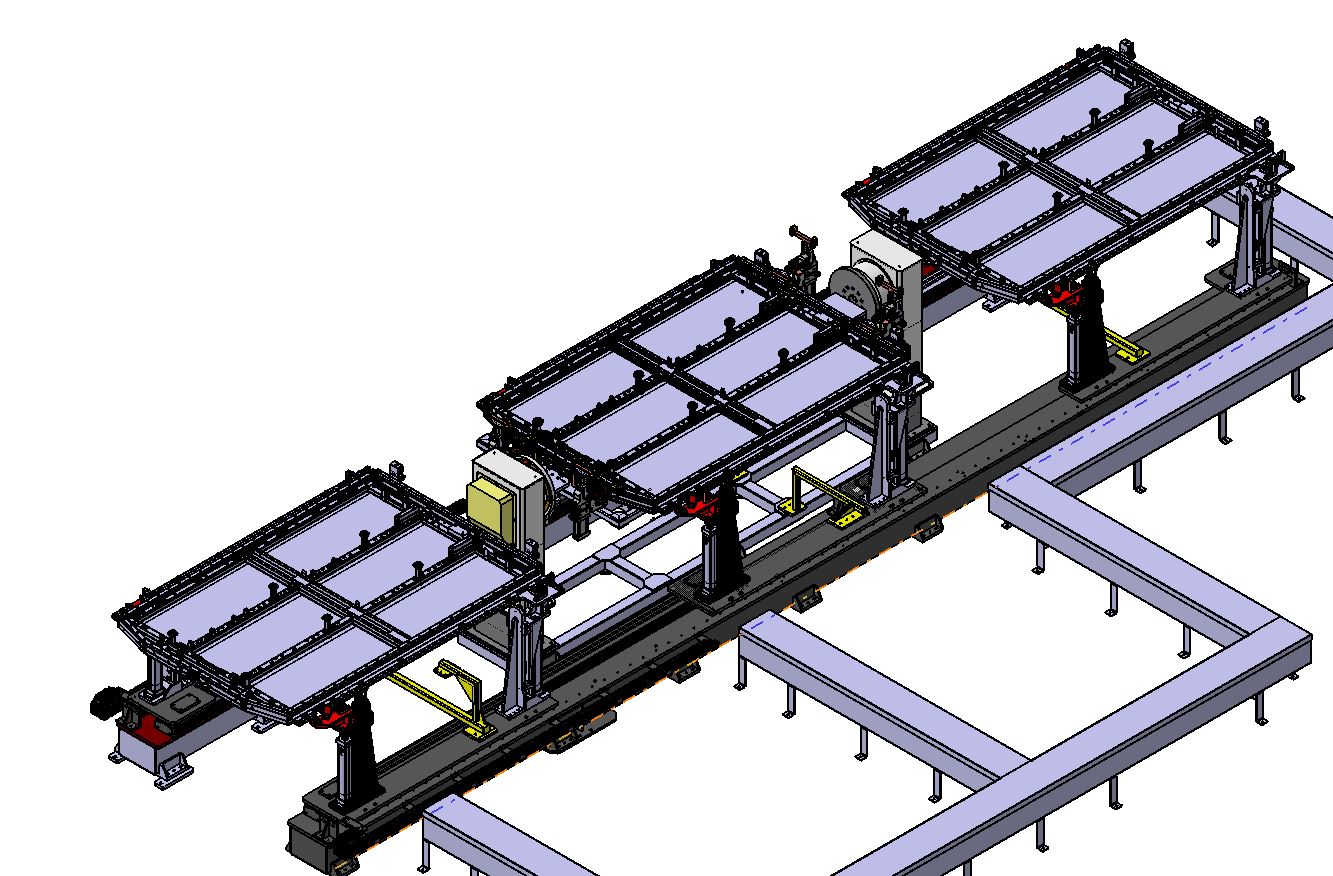
项目介绍:
拉铆机器人可以使繁重的、严重依赖熟练工的手工拉钉作业,升级到自动化作业,
为企业节省大量人工费。拉铆工作站是在工业机器人基础上发展起来的铆接设备,
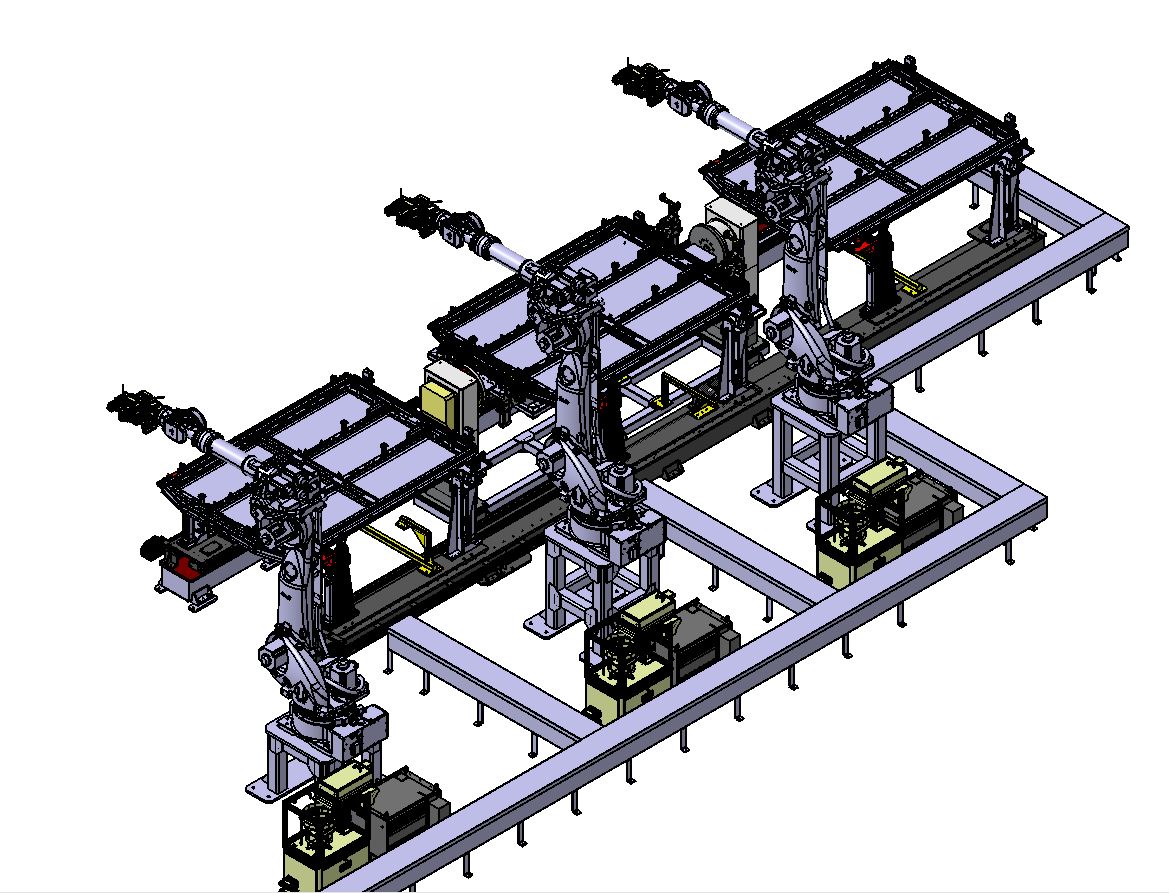
由机器人本体、自动拉钉设备、检测系统、工件定位系统等组成。
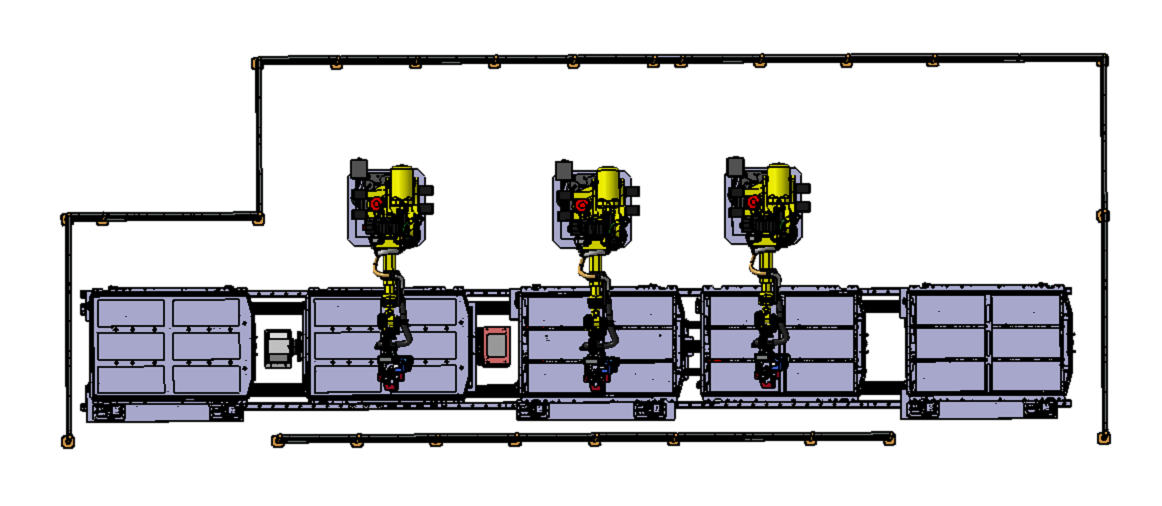
作业流程
1.产品上料和下料依靠吊具或人工搬运完成
2.产品移动由顶升定位工装输送到OP20工位时,
3.OP20工位铆接完成后,翻转180度,由顶升定位工装输送到OP30工位
4.OP30工位铆接完成后,输送到OP40工位
5.OP40工位铆接完成后,输送到OP50工位
6.人工取料